| Home | About Me | Projects | Resume | Contact |
Boeing Research: Onboard UAV Mission Processor
|
Date: Summer 2013
Disciplines: Embedded Systems, Avionics, Unmanned Systems, Image Processing, Low Bandwidth Networking Technologies Used: COM Express boards for processor stack, C# for UI/ground control station, JPEG 2000 Interactive Protocol (JPIP) for low bandwidth image transmission, Precision Image Registration (PIR) for automated geolocalization using onboard satellite image reference database. Team: This was my individual project within Boeing Research & Technology's Electronic Prototyping & Integration Center (EPIC) Labs, since merged into Avionics Systems Technology (AST). Advised by Mike Abraham. |
|
Description: Boeing Research EPIC Labs (now part of AST) seeks to enable rapid R&D efforts at Boeing. In developing unmanned aerial vehicle (UAV) applications, it is crucial to have a hardware platform to test and develop with. For most UAV applications, there is generally some software to run onboard, possibly software to run on the ground station, and possibly some experimental payload on the UAV. Usually, R&D teams would have to invest significant time and resources developing their own UAV just to test experimental software and payloads. The Boeing EPIC UAV Testbed provides a small fleet of UAVs that other groups can use so that they don't have to make this upfront investment cost and can rapidly test their algorithms and payloads. The testbed includes several SuperBat UAVs (see picture below). The SuperBat UAVs come with a Cloud Cap Technologies Piccolo autopilot. This flight computer takes care of waypoint navigation and flight controls based on IMU orientation and GPS position. However, there is no auxiliary computing available for experimental software and payloads. My objective was to design a system to give as much onboard processing capability as possible for experiments given harsh size, weight, and power (SWaP) constraints. I also had to make sure not to jeopardize flight critical systems and integrate the system safely with the rest of the vehicle. In just 5 weeks, I designed a small form factor mission processor system using COM Express boards (see figure below). These boards a bit bigger than the older PC/104 standard and vendors offer newer more powerful processors on them. The stack I created consists of a computing board with a quadcore Intel i7 processor, a carrier breakout board that connects to all the peripherals, and a thermal board with fan and cooling vanes which connects directly to the processor chip via thermal gel. Cool outside air flows into the UAV through the camera gaps in the front and out through a small hole in the back. I ran the computations to ensure by conservative estimates that the processor wouldn't overheat and that with max power consumption and the LiPo batteries I picked, we'd have at least 2 hours of flight time with the system. I used a COTS laptop SSD for onboard data storage. I also designed a power system with DC-DC converters to ensure correct regulated voltage from the batteries to the processor board and peripherals. I worked with procurement to get everything ordered, built, and tested the system. (Phew!) For the second half of my internship, I focused on software applications to run on the UAV, hardware in the loop tests, and integrating the system with the rest of the UAV. In particular, I got JPIP working, so that the UAV can act as a server hosting collected imagery and the user at the ground station can specify what imagery he wants at particular resolutions with an easy-to-use UI. The imagery will then be transmitted to him using minimal bandwidth. I also worked with Precision Image Registration (PIR), a Boeing algorithm which compares the landscape below the UAV to an onboard reference database of satellite imagery to figure out precisely where it is. This could be used in GPS-denied warzones. I'm happy to say that after my internship, the group flight tested a UAV equipped with this mission processor system hosting an experimental software payload and it worked! [I've been told I can talk about anything for this project, but my official paper and presentation slides are still waiting to be authorized for public release by Boeing, so I'm just using public media below.] |
 MLB SuperBat UAV, image courtesy MLB
MLB SuperBat UAV, image courtesy MLB
|
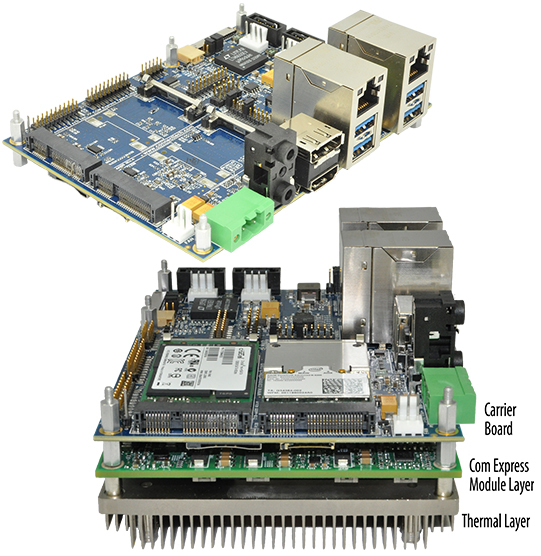 COM Express carrier board, image courtesy Connect Tech
COM Express carrier board, image courtesy Connect Tech
|
| Back to Projects |