| Home | About Me | Projects | Resume | Contact |
CubeSat
|
Date: Fall 2011, Spring 2012
Disciplines: Astronautics, Embedded Systems, Space Systems Technologies Used: SolidWorks, Arduino, ham radio Team: about a dozen undergrads |
|
Description: An interesting recent development is the rise of small satellites. Small satellites can be packed into rockets as secondary payloads, piggybacking on bigger, more expensive payloads. This enables huge cost savings. Furthermore, as sensors, processors, and other electronics continue to get smaller and cheaper, it opens up what can be done with a tiny satellite. Cubesats are tiny 10cm-sided cube satellites. Our club president, Hubert Wong, had formed a partnership with Professor Papadopoulos at San Jose State University (SJSU) where our club and SJSU would develop a 2 unit Cubesat to better understand the lower thermosphere as part of the ESA-funded QB50 mission, an initiative to launch a network of 50 Cubesats which would last about six months or so and then burn up on reentry into the atmosphere, collecting valuable data throughout their flight. I led development of the electronics, which was the majority of the work on the project. My teammate Sam Cohen led mechanical development and did a great job making a frame out of alumnimum with a CNC waterjet! (see below figure). The initial work mainly focused on prototyping with embedded boards and sensors. An arduino and camera used for testing are shown below. The satellite was planned to use ham radio to communicate to a ground station, so I earned a general license. We had planned to do a high altitude balloon test as a first milestone. Unfortunately towards the end of the year, Hubert let us know SJSU pulled out of the project and so we had no launch vehicle or mission to work with. After Hubert left, I became the new project lead and I secured an opportunity with AMSAT, a group of very nice folks who are behind the Fox series ham radio CubeSats and were happy to let us collaborate. However, I provided the team with an alternate project in the form of a NASA rover design competition I had discovered while at NASA JPL, RoboOps, and the club elected to pursue that project instead as a change of pace. |
Our CubeSat
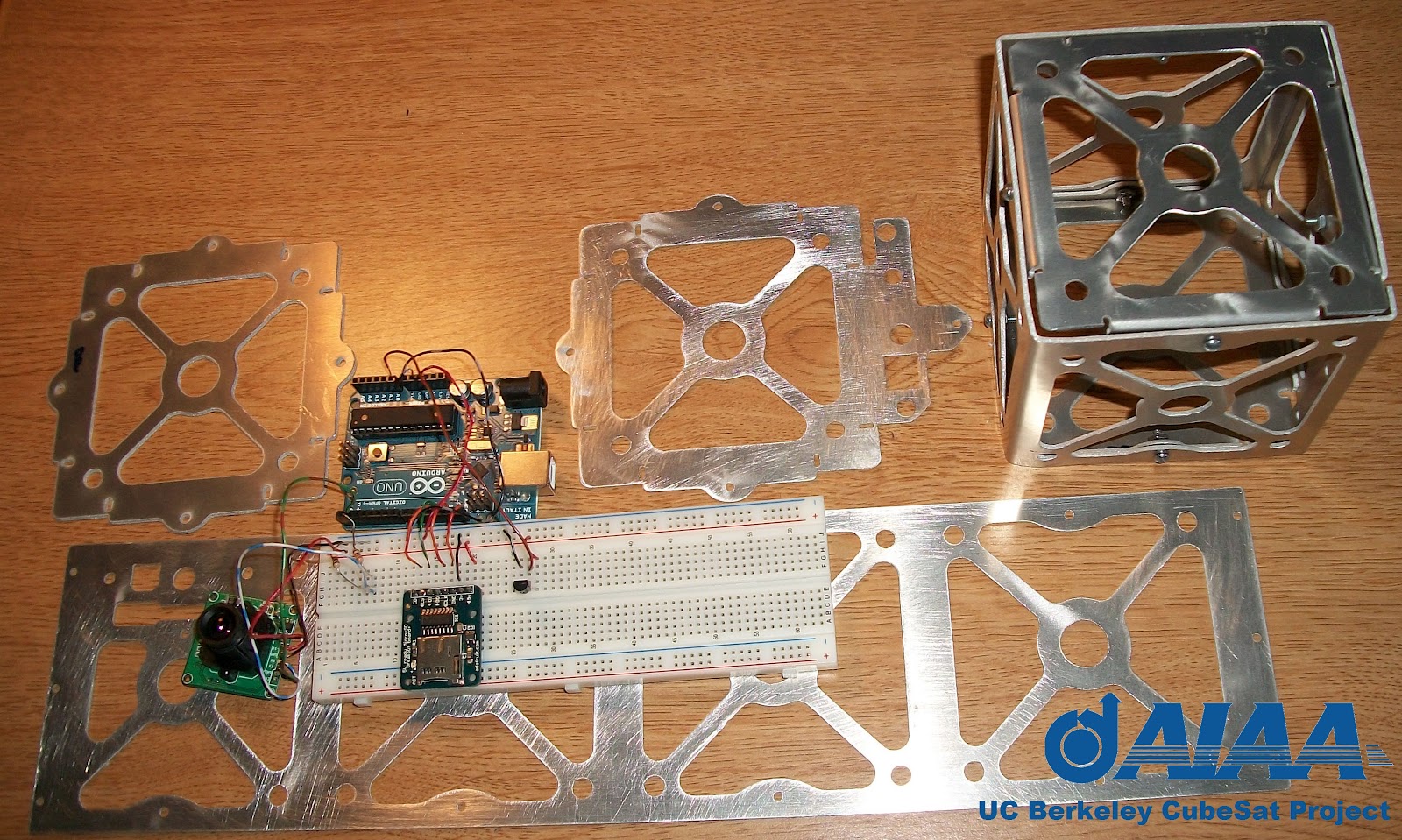 Our prototype CubeSat frame, and early C&DH system with Arduino microcontroller, camera, temperature sensor, and microSD card module.
Our prototype CubeSat frame, and early C&DH system with Arduino microcontroller, camera, temperature sensor, and microSD card module.
| Back to Projects |